Le référentiel en physique
Un référentiel est un solide (un ensemble de points fixes entre eux) par rapport auquel on repère une position ou un mouvement.
Composants d'un référentiel
À chaque référentiel est associé :
- un repère d'espace pour quantifier la position ;
- un repère de temps (une horloge) pour associer une date à chaque position.
Vecteur-position
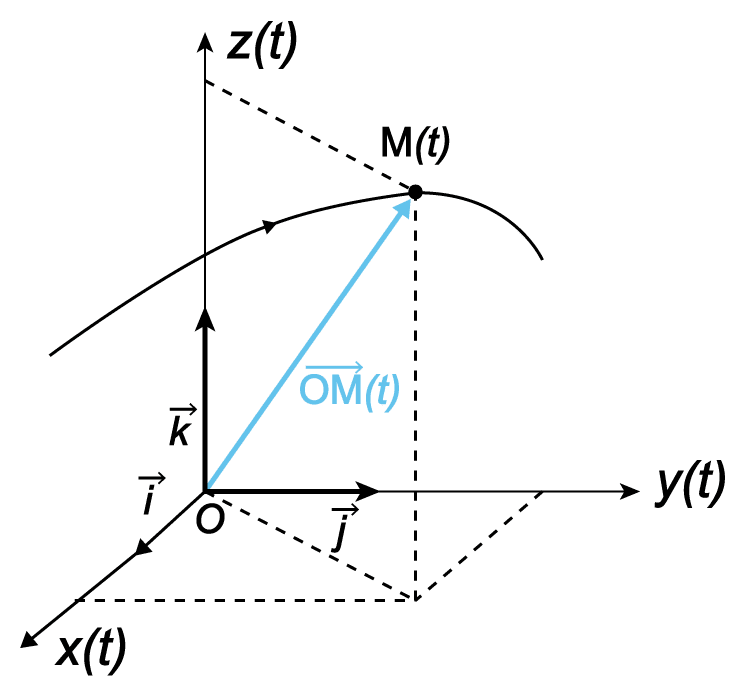
La position d'un mobile $\rm M$ dans un repère $(\mathrm O, \vec i, \vec j, \vec k)$ est donné par son vecteur-position $\rm \overrightarrow{OM}$ :
$\overrightarrow{\rm OM} (t)\begin{pmatrix}x(t)\\y(t)\\z(t)\end{pmatrix}$ $\Leftrightarrow$ $\overrightarrow{\rm OM}(t) = x(t) \vec i + y(t) \vec j + z(t) \vec k$
Trajectoire d'un mobile
L'ensemble des points est occupé successivement par le mobile $\rm M$ au cours du temps appelé trajectoire.
La trajectoire d'un point correspond à l'ensemble des positions successives occupées par ce point au cours de son mouvement.