Introduction
Il existe pour tout système technique une relation entre les grandeurs d'entrées (la ou les commandes) et les grandeurs de sortie (les actions). On représente un système technique et ses interconnexions par des schémas blocs.
Système en boucle ouverte
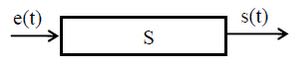
Un système en boucle ouverte n'a aucun retour d'information sur la sortie. Des écarts peuvent donc apparaître entre la valeur de commande et la sortie.
L'utilisateur doit adapter en permanence la valeur de la consigne sans garantie de maintenir au niveau souhaité la grandeur physique en sortie.
Avantages et inconvénients
- Avantage : systèmes très simples à mettre en œuvre
- Inconvénients :
- Correction difficile. Obligation de réajuster « manuellement » la commande pour modifier la sortie.
- Sensibilité aux perturbations qui, à tout instant, peuvent affecter la sortie.
Ouverture d'une fenêtre dans une pièce chauffée.
Système en boucle fermée
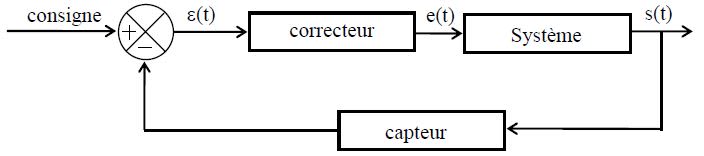
Dans un système asservi, ou en « boucle fermée », on installe une boucle de retour pour corriger les écarts de la sortie. On compare la grandeur de sortie (connue grâce au capteur) à une valeur de consigne (rôle du comparateur) et on corrige la valeur de l'entrée du système (rôle du correcteur).
Utilité de l'asservissement
Il n'est pas nécessaire d'asservir un système si son comportement est bien connu et s'il n'y a pas de perturbations. La boucle fermée permet de tenir compte de perturbations et améliore les performances du système.